Simultaneous Localisation And Mapping or SLAM is a relatively new mapping software used by mobile surveying systems to keep track of the device’s location within any applied area. Manufactured as a rapid survey option for point cloud captures, mobile SLAM devices allow for quick and rapid captures of large sites while maintaining minimal setups.
How Does SLAM Work?
Employing state-of-the-art multi-senor fused pipelining techniques using a LiDAR and other sensors, the SLAM advanced non-linear optimisation algorithm will simultaneously localise and commence capturing a 3D point cloud of its surrounding environment. This self-locating odometric pipeline results in map generation without reliance on external infrastructure such as Global Positioning Systems. This makes it ideal for GPS-denied environments such as mines, tunnels and dense urban areas. Working in conjunction with LiDAR , IMU (Inertial Measurement Unit) and intermittent external information, systems such as the TerrusS are able to generate extremely accurate positional and orientation estimations. This combined with SLAM’s ability to align and generate improvements every few seconds allows for surveyors to create incredibly accurate large-scale maps with ease.
Benefits of SLAM
Speed and Accuracy
Mobile
Instantly Accessible
No GPS Reliance
Award Winning SLAM System
Aspiring to further push forward SLAM capabilities, competitions are held all around the world for companies to display their system’s abilities. One business currently heading the market is the Australian tech company, CSIRO.
In collaboration with AutoMap’s TerrusM system, CSIRO’s “WildcatSLAM” algorithm has been awarded for its industrial-grade accuracy and reliability in competitions such as the “Hilti SLAM” and “DARPA Sub-T” challenges. Beating out big-name competitors such as Google and NASA, WildcatSLAM has shown that it’s easily the world’s best-in-class SLAM solution.
SLAM APPLICATIONS
GIS
Survey
Mining
Robotic
Construction
Reality Capture
SLAM in Underground Applications
The introduction of SLAM has allowed the globally accurate capture of subterranean areas where traditional survey methods omit a significant amount of detail. Previously impossible to survey environments such as mines, tunnels and caverns are now utilising this technology to finally record and visualise these areas like never before.
Unlike other mobile forms of surveying technology that degrade map quality as GPS quality degrades, SLAM systems meticulously employ internal odometric capabilities to fill in the blind spots. Utilising Ntrip providers such as the free government-run AUSCORS and SLAM software, systems like the TerrusS can effortlessly capture globally accurate, large-scale maps in GPS-denied areas such as streetscapes, urban canyons and other mixed indoor and outdoor environments.
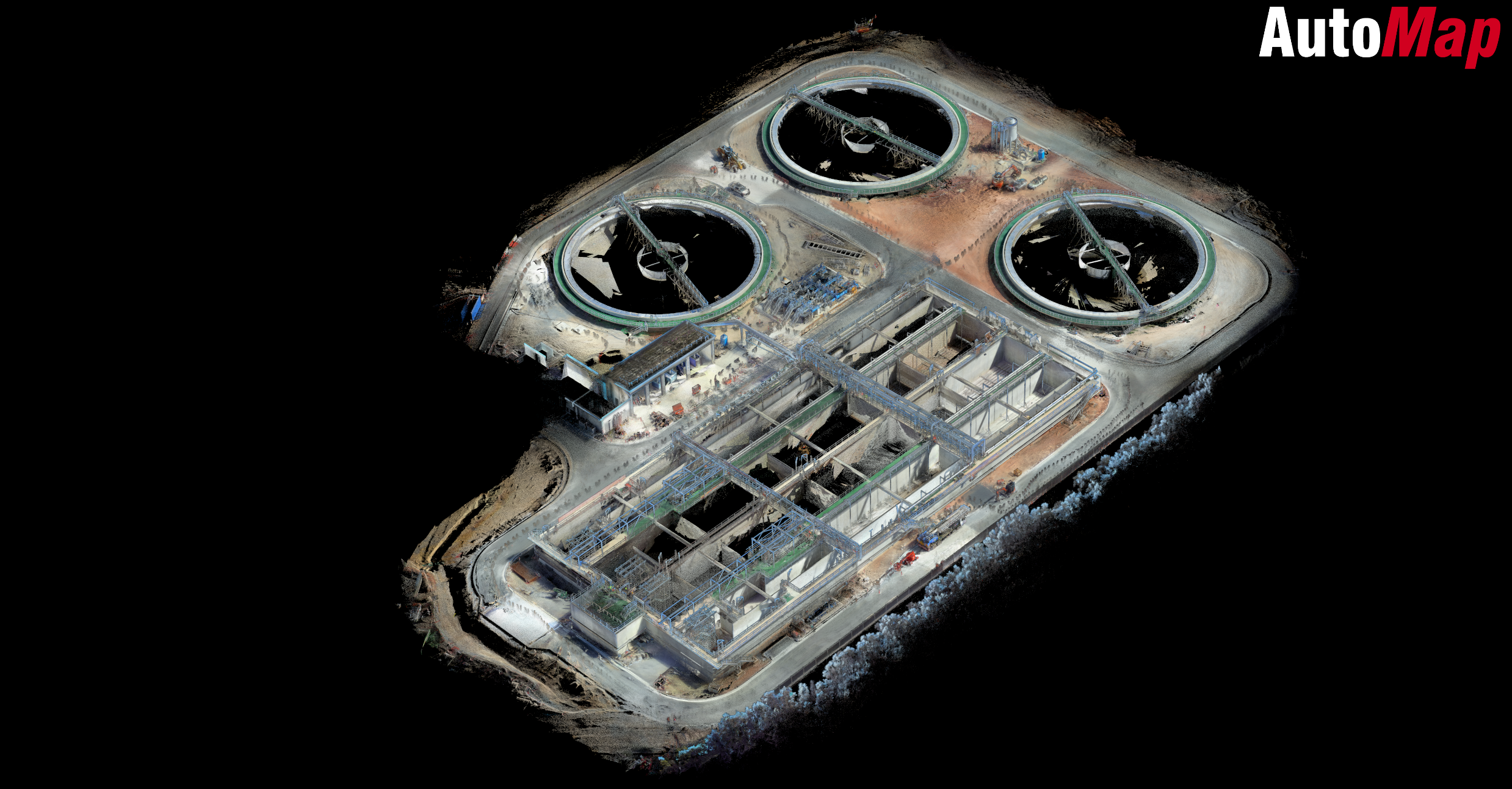
Ideal for construction and AEC applications, SLAM capabilities have matured to the point where accurate HD maps can be collected in low-speed acquisition applications without the use of external control. This is due to the active sites having sufficient information to accurately map the scene with negligible drift. In rare cases, data-rich SLAM maps have been operated to check for tolerances in the different grades of survey control.
Short answer, Yes! The long answer, it depends on the user and application. Already being employed for many surveying and GIS applications one of the largest obstacles for SLAM software is understanding and conforming map-drift over large-scale areas.
While many mobile systems are useful for reality capture and small-scale maps, most lack the ability to accurately “Realign for Drift” to product globally accurate data on large sites. Thanks to the combined efforts of systems and software such as the TerrusM and WildcatSLAM, this obstacle is quickly becoming a relic of the past.
Why Does SLAM Drift Happen?
Though not exclusive to only SLAM systems, “Drift” is an artefact of an accumulated displacement error that occurs over linear distance as a function of speed. The faster and further you go, the more likely you are to find inaccuracies with your map. The structure of the environment itself can also influence the presence of drift, especially when the space is big, open and bare.
How to Mitigate SLAM drift?
The best method to ensure negligible drift with large-scale SLAM point clouds is to use external information such as control points or GPS in order to realign drift found within the odometric trajectory and conform each map. While all AutoMap’s systems do this automatically, Surveyors will need to make note of their control point density vs the speed and length of data capture to maintain a level of minimal global accuracy. For example, this animation demonstrates the results of mapping 1km of a subterranean mine decline. When travelling less than 5km an hour only 1 control point would be needed for this distance. However, if you were to increase the travel speed to 30km an hour over the same distance, control would be required every 150m.
Different environments require different levels of control point density. Unlike stationary surveying systems, SLAM’s drift is a result of distance, not time. The slower you go, the less control is needed and the more data-rich and accurate your scans will turn out.