Conforming SLAM Maps to Survey Requirements Without GPS

Reading time: 4 Minutes
28/09/22 Written By Shaun Coghlan
The Next Generation Of Subterranean Mapping
As surveying equipment continues to improve, Automap continues to lead the SLAM industry with their latest in underground mapping solutions. Their best in class system, the TerrusM, allows users to counter the industry wide issue of capturing data when there is an unsourceable global truth.
Experimented and trailed via tier one mining companies in Australia, TerrusM surveyors are able to utilises SLAM capabilities to conform point cloud maps with award-winning accuracy and negligible drift.
Due to this, many surveying companies across the world have begun to employ these exceptional mobile units.
Evolving the survey industry unlike ever before, these systems allow users to systematically record and capture previously unmappable environments with ease.
An Age Old Problem
Throughout the history of the survey, it has been a well documented challenge to successfully create accurate subterranean maps. This has been due to traditional surveying methods such as total stations omitting a significant amount of detail as GPS is unavailable underground.
In a paper reported by Brent Slaker in early 2015 (p47- p48), he discusses the unfavorable conditions for LiDAR capture in “Coal mines’ due to dust, shadows, abrupt texture or shape changes, reflective surfaces, and movement. All common traits found throughout underground mapping as previous technology lacked the ability to self-locate without the need for GPS.
A Huge Change For the Industry
The introduction of SLAM into the mainstream has allowed surveyors to address this concern, providing a rapid and accurate solution for capturing these subterranean areas. Where traditional static underground capture methods falling short of recording a complete capture of the scene, the TerrusM utilises global constraints to produce accurate and complete data-rich maps.
Designed for versatility, TerrusM users can magnetically attach these mobile systems to the exterior of any vehicle for streamlined capture throughout GPS-denied environments.

Accuracy Like No Other
Utilising WildcatSLAM’s award-winning SLAM odometry pipeline, the TerrusM has demonstrated on several occasions to conform point cloud to a higher level of accuracy than other SLAM-based solutions.
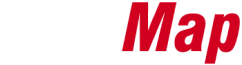
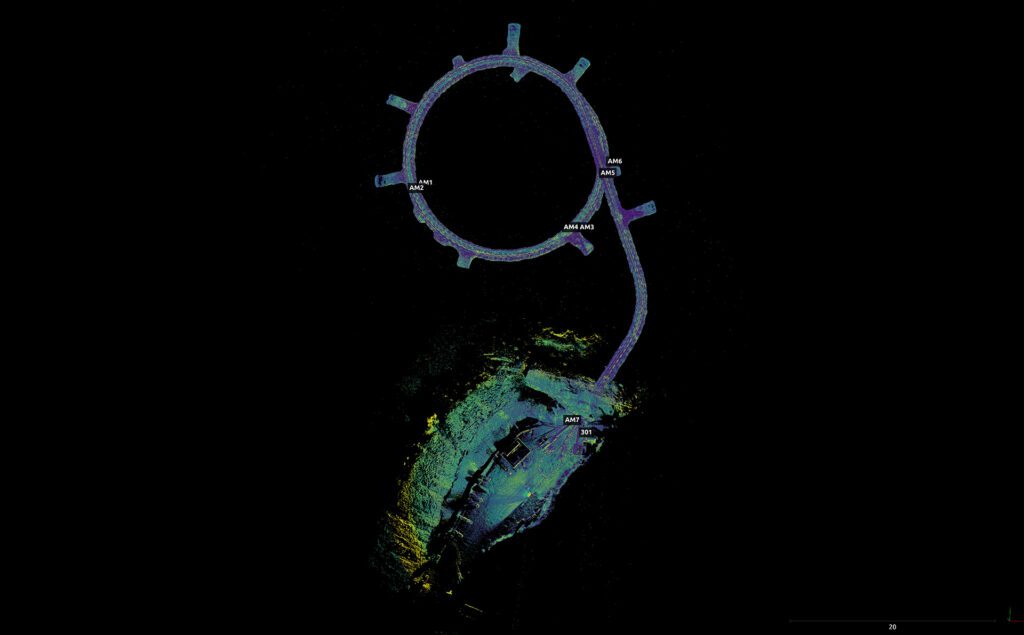
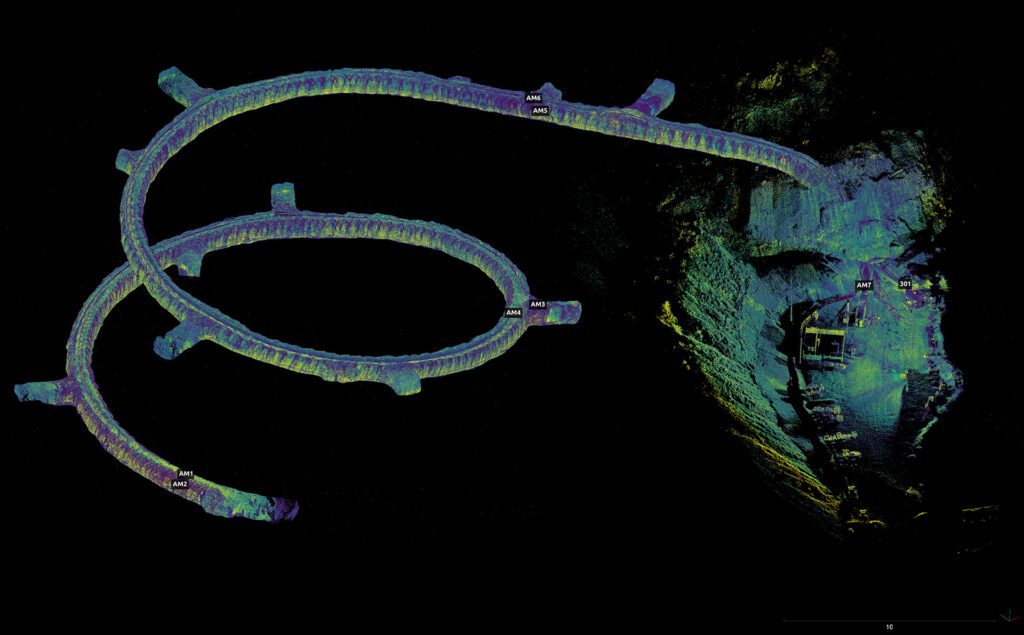
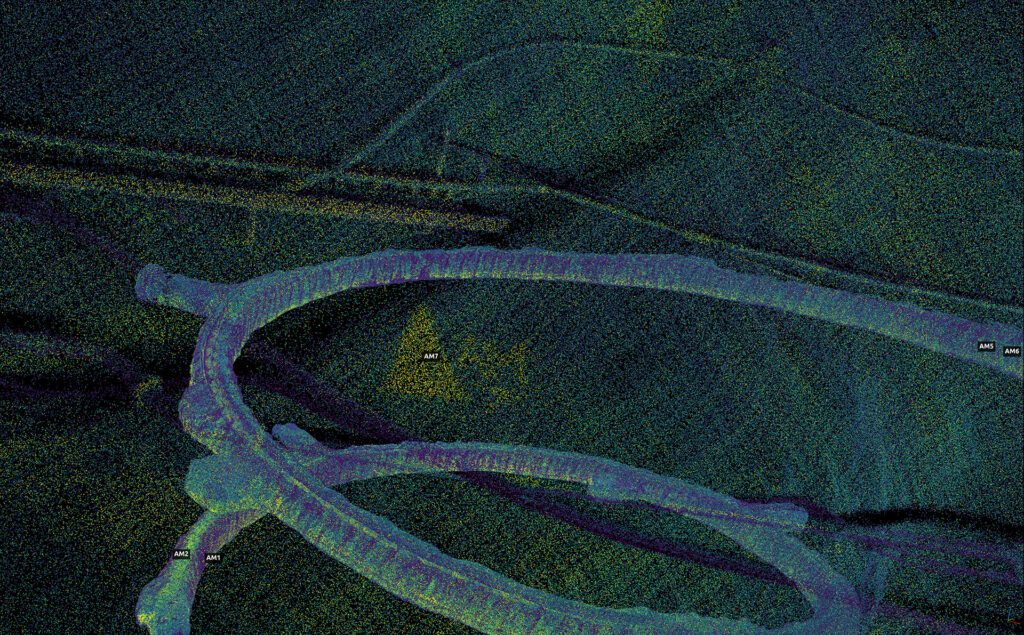
As evident in recent scans of a Queensland mine, surveyors believed there to be an issue with the system, assuming that the point cloud had drifted by 40mm of the final control point.
Raising concern, this inconsistency was examined over several levels of assessment. Throughout this examination process, the system was compared against traditional surveying methods. Discovering that the TerrusM had successfully hit nine of the ten control points down to millimetre accuracy. The only variant being that of the final control.
Leading to further inspections, this divergence came to conclusion as it was found that the control point was off the mark due to angular degradation over a significant traversal length and not as a result of the TerrusM.
Mitigated Drift
One of the largest existing concerns for SLAM-based systems is that of mapping drift.
As SLAM is an odometric displacement that drifts over linear distance as a function of speed, it has previously been depicted as globally unreliable in its accuracy. However, as technology has drastically improved, the TerrusM allows users to automatically utilise existing control points to align trajectories and conform their maps to a globally accurate state.
In an effort to trail this, an experiment was done over 1km of mine decline using the TerrusM system. Over this time, TerrusM surveyors discovered that due to the environment of the scan, certain adjustments would need to happen to maintain a level of minimal global accuracy.
The main adjustment being that of control point density versus speed and length of data capture. As SLAM drift is a function of distance and speed, instead of time, the further and faster that users travel the more important the control points become to maintain a globally accurate map. As a result, a higher control point density is required when driving at higher speeds.
This was visible during the decline experiment as it was discovered that only one point of control would be necessary over the 1km when traveling at 5km an hour. In contrast, when traveling at speeds close to 30km an hour, one control point would be needed every 250m to mitigate drift.
The slower of the two results resulted in users with a more data-rich and detailed point cloud map. This was larger due to the slower speeds allowing for the LiDAR sensors and cameras to ingest more information.