
Evaluating Core SLAM Inconsistencies: An overview of Slip, Drift, Aliasing, and Global Repeatability in LiDAR Mapping Systems

Reading time: 5 Minutes
31/10/23 Written By Tom Warner
Overview
Simultaneous Localization and Mapping (SLAM) technology is essential in many applications throughout robotics, mapping and surveying. LiDAR-based SLAM systems typically consist of low-cost sensors and are considered novel for their robustness and versatility in GPS-denied environments. As their operation continues to expand further into industrial and commercial industries; the demand on identifying and then using the system as a tool to localise and map-build within challenging environments will continue to grow.
This article presents a framework for quantifying a SLAM rating for LiDAR scanners operating at low-speed (i.e. pedestrian speeds) focusing on the most common characteristics required to be understood. This enables the operator to successfully identify appropriate applications and procedures to consider before capture.
The TerrusM and VellusX SLAM Lidar system
Introduction
SLAM technology enables a device to construct or update a map of an unknown environment while simultaneously estimating the location of the sensors whilst creating a map of the space. LiDAR sensors are a common choice for SLAM integration due to their price, availability, high accuracy and the richness of 3d data. As the technology is increasingly used in survey applications, it must be robust against specific challenges posed. We propose a set of metrics and methodologies for evaluating the performance of SLAM LiDAR scanners in such conditions.
Linear Drift
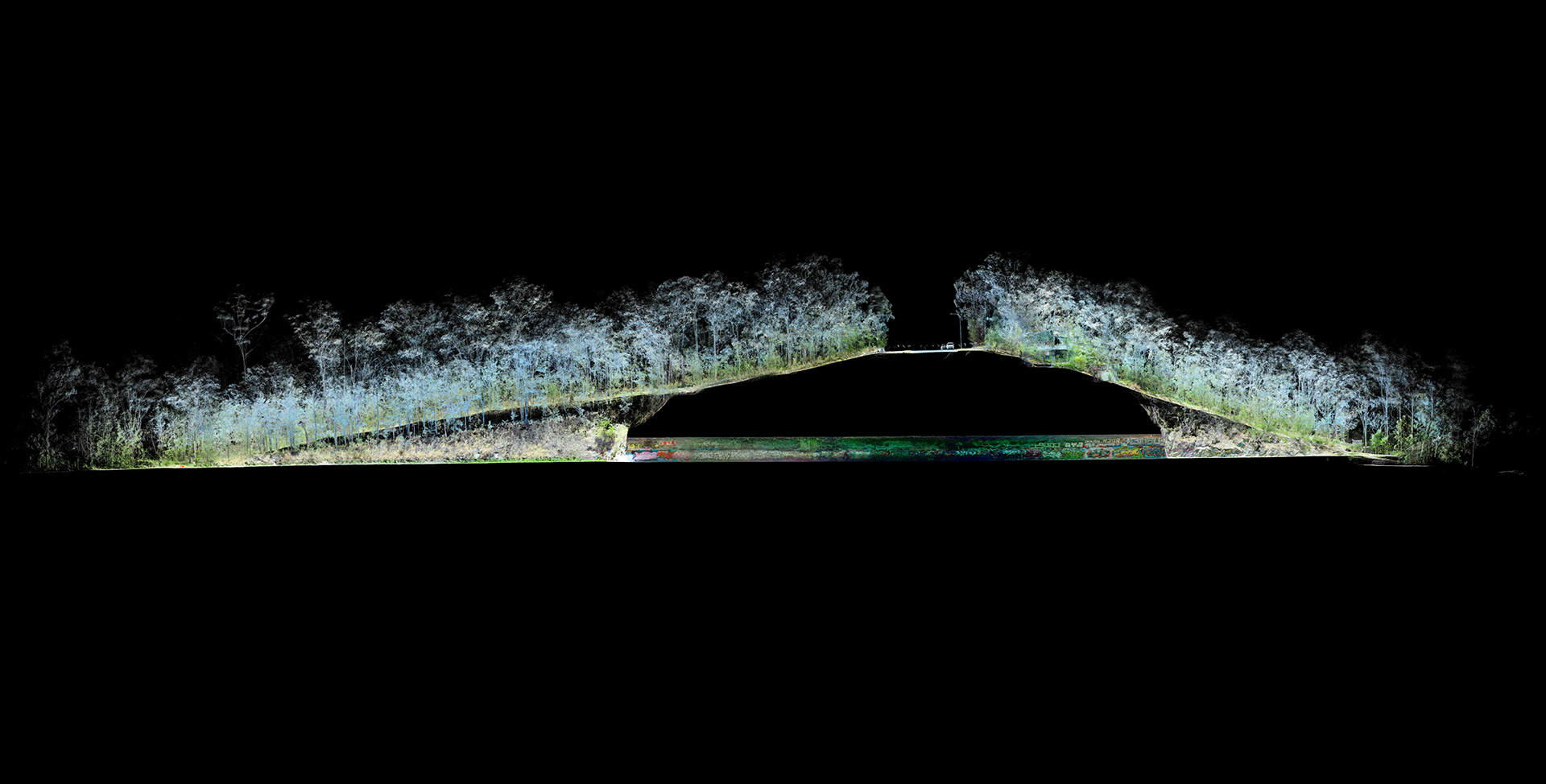
Linear drift refers to the gradual deviation of the scanner’s estimated path from the true trajectory over distance. At walking speeds, the drift can be more pronounced due to the frequent changes in direction and varying speeds of human movement.
To quantify a system’s linear drift, long trajectory should be created within a structured space. It is important to ensure that the system is kept at a relatively constant speed in order to correctly rate the scanner’s performance over that distance. If the system uses external constraints such as survey control or gps then it should be disabled for the duration of the run. Loop closures should also be avoided to negate the possibility of the inadvertant redistribution of path error.
Long linear run constrained by RTK Gps
Slip
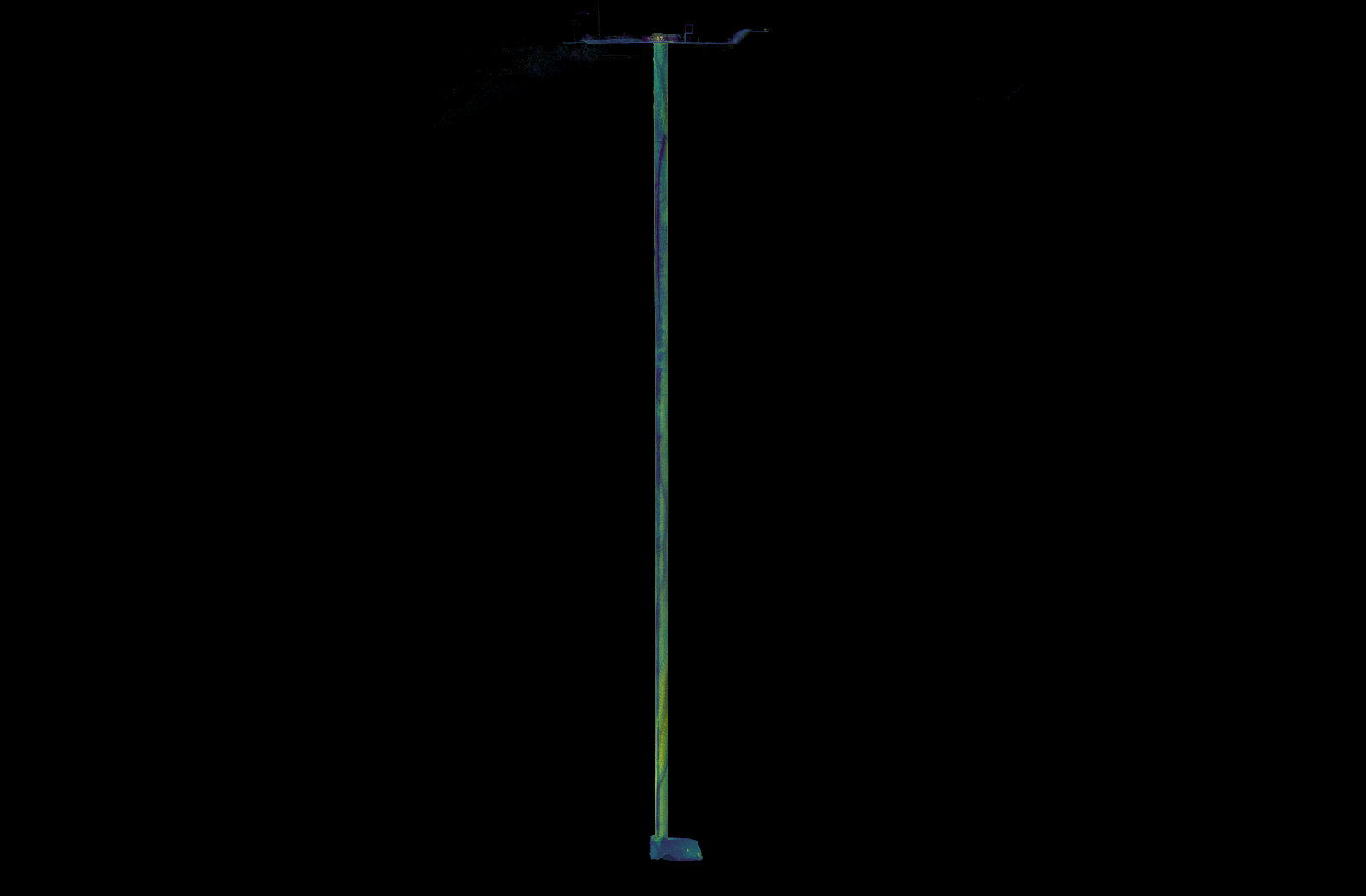
Slip occurs when the scanner’s motion estimation temporarily loses track of its true position, often due to sudden movements or if a sensor’s maximum threshold has been reached by the motion experience. In laser based systems slip becomes more common in low-feature environments where there is not a lot of dimensional geometric uniqueness.
The scanner should be subjected to tests in a low feature space where repeated dynamic movements are simulated. The system’s recovery from slip should be time-bound, and its frequency should be minimised.
Effective SLAM LiDAR systems should recover from slip within a few milliseconds and should not experience slip often. If the system does not recover from slip quickly then the map will be permanently corrupted and data collected after the time of the slip cannot be reliably used and is clipped from the map.
"Low feature environments such as the ones depicted below can commonly lead to slip. Higher quality SLAM solutions can captured a larger diversity of low-feature spaces with more robustness"
Low feature environments
Aliasing
Aliasing in SLAM occurs when the environment contains repetitive structural patterns that can mistaken as being identical, leading to erroneous localisation and a corrupted map.
The mistaken structural patterns can often be uniquely re-characterised by capturing additional information about the area. This may include the use of adding unique geometry to the scene in order to adequately differentiate repeated structure. It could also be resolved by adding additional constraints by-way of survey control or fiducials to constrain each feature.
A robust SLAM system should demonstrate that it can use fine features at a range to be able to accurately capture the space. The usable domain of each feature is largely dependent on the application. Knowledge of how the system operates at a wide variety of use cases is essential to be able to use the tool for survey applications.
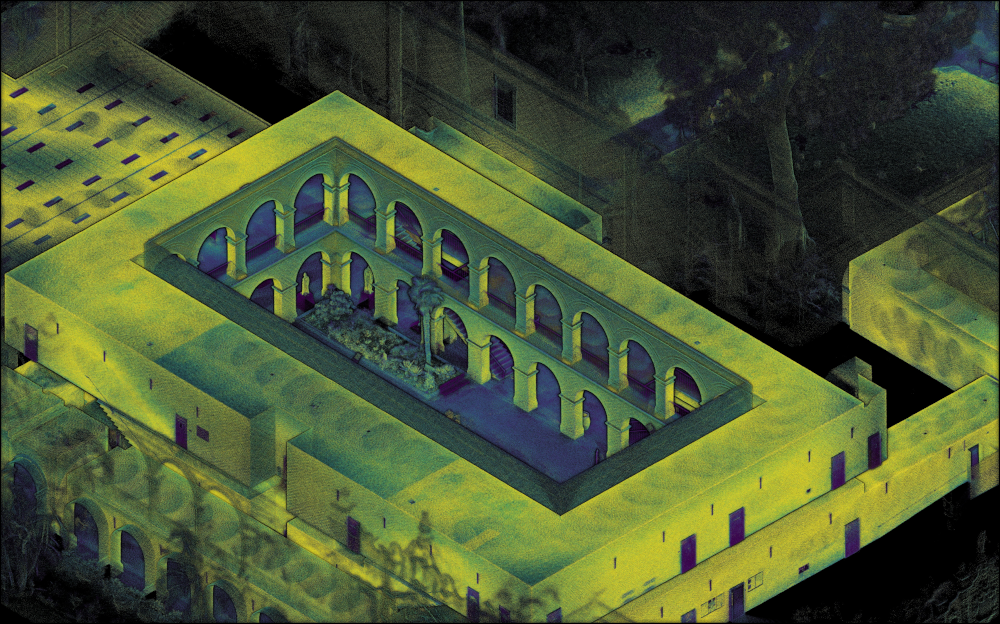
A structured repeated environment
Globally Accurate and Repeatable Mapping
In order to reliable create globally accurate maps, understanding of the previously mentioned concepts are required so that the capture process can be run without issue.
Vendors create and recommend various motion constraints and/or survey control to create an accurate map. That map can then be transformed globally so it can be compared to previous historical instances.
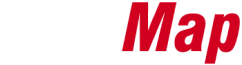
In order to test global repeatability, parameters such as speed, trajectory or time of day can be varied to test the robustness of the device.
Repeatability of the area captured by driving
Conclusion


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}