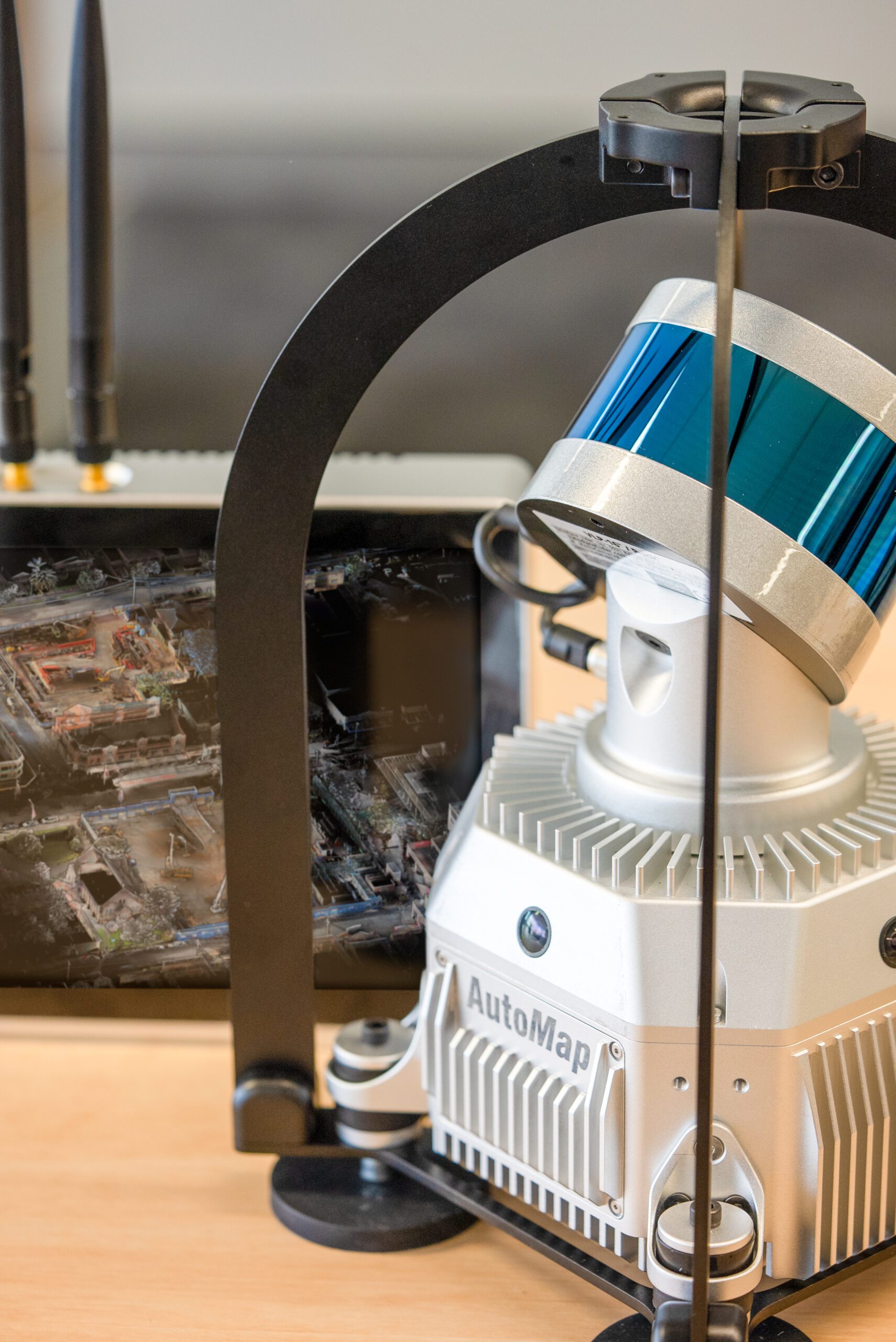
The award winning TerrusM is the best-in-class, ultra-low drift mapping system used for reality capture, GIS or large-scale survey applications. Globally accurate, colourised maps are generated on system as either a .las or .ply format using 4x 4k 360 degree colour cameras located about the perimeter of the sensorpack. Whether it be walking or driving, the TerrusM creates rapid large scale maps of challenging and difficult environments. Move into the world of mobile scanning with the TerrusM to take advantage of the next generation mass data SLAM mapping capability today.