
Strategies to mitigate aliasing in SLAM laser scanners
Reading time: 5 Minutes
30/11/23 Written By Tom Warner
Abstract
Simultaneous Localization and Mapping (SLAM) systems are instrumental in accurate mapping and autonomous navigation, enabling robots and vehicles to concurrently build maps of their environment and locate themselves within it. Laser scanners are a popular choice in SLAM systems due to their observational precision. Aliasing in SLAM is defined as the misinterpretation of repeatable spaces as being the same space when they are in fact not. Aliasing poses a significant challenge, leading to inaccuracies in the generated maps and the estimated robot trajectory. This white paper provides an analysis of aliasing in SLAM laser scanners, its origins, impacts on mapping accuracy, and proposes strategies to mitigate its effects, aiming to enhance the precision and reliability of autonomous navigation systems.
The TerrusM and VellusX SLAM Lidar system
1. Introduction
1.1 Background
Laser scanners in SLAM systems are crucial for precise distance measurements, enabling accurate mapping and localization. Despite their advantages, these systems are susceptible to aliasing, resulting in significant mapping inaccuracies.
1.2 Purpose
This white paper aim to explore aliasing in SLAM laser scanners, identify its causes, assess its impacts on mapping accuracy, and propose effective strategies for its mitigation.
2. Origins of Aliasing in SLAM Scanners
2.1 Sampling Below the Nyquist Rate
Aliasing occurs when the laser scanner samples the environment confuses the current local geometry with the geometry of another section of the map.
2.2 Aliasing Constraints
Different SLAM implementations have internal constraints that they use in order to distinguish between like spaces. The methodology and internal mechanism used to distinguish between repeated spaces can vary significantly between alternate SLAM implementations and surveyor’s should thoroughly understand the limitation of a particular system in order to be able to use it successfully to survey environments with repeated structure.
2.3 Environmental Complexity
Complex environments with small or intricate features can contribute to aliasing, as the laser scanner may not sample these features at a sufficient rate.
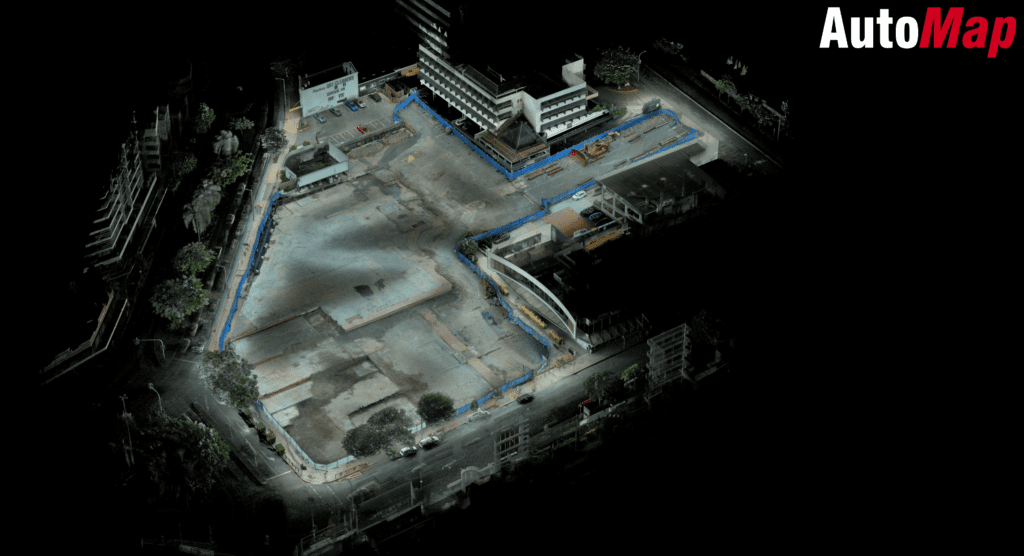
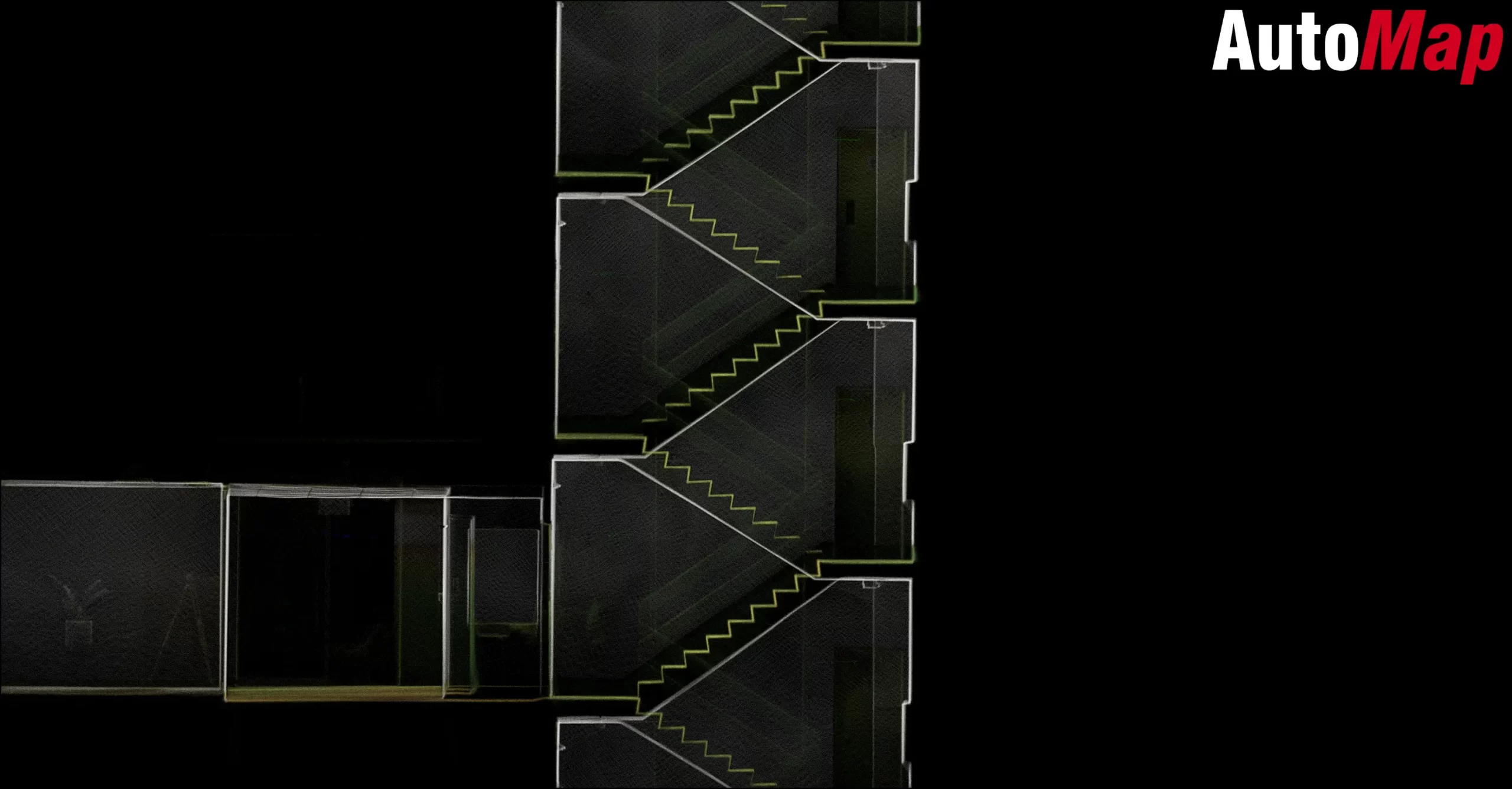
"Low feature environments with limited uniqueness such as the ones depicted below can commonly lead to aliasing. Higher quality SLAM solutions can capture larger spaces in highly repeatable environments"
Low feature environments
3. Impacts of Aliasing on Mapping Accuracy
3.1 Map Distortions
Aliasing in mapping, relates to the inability of the SLAM solution to distinguish two similar environments. Usually, these environments are very repeatable in nature and a human operator would also struggle to differentiate visual uniqueness of the space. Map aliasing can lead to double registration of the map in local segments of highly repeatable structure creating and overall inaccuracy in the generated global map.
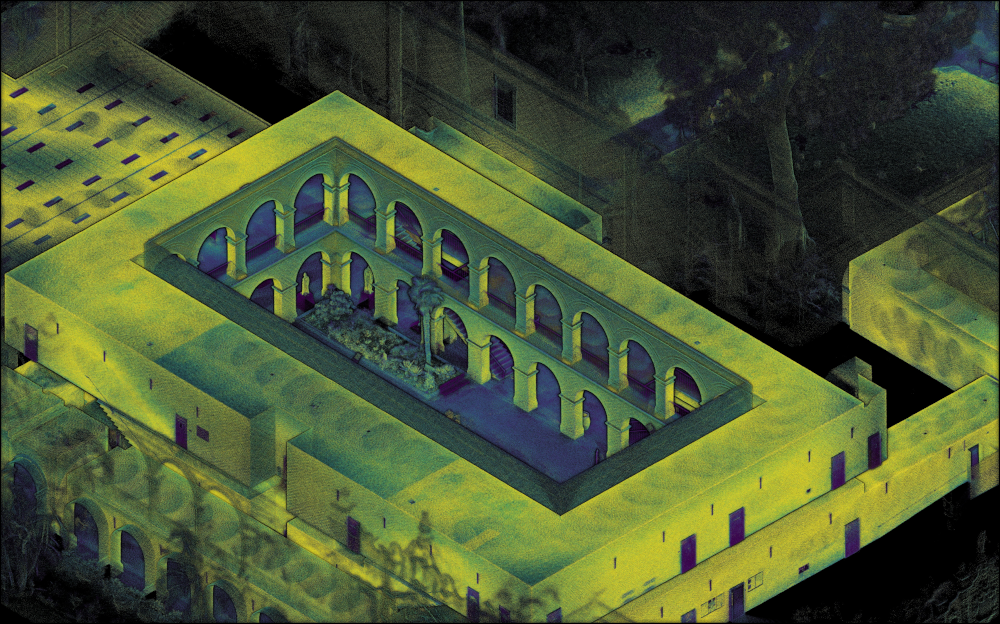
A structured repeated environment
4. Strategies to Mitigate Aliasing in SLAM Scanners
4.1 Distinguished Visual Uniqueness
Increasing unique structure within a local environment can significantly help SLAM scanners from accidentally aliasing a repeatable environment. The size and geometry of the repeated structure can have an impact on the ability of the SLAM solution to successfully digitise the space. Fiducial such as markers or vehicles that are unique in shape and size can be placed to ensure that repeatable environments are made unique in the perspective of the sensor’s field of view. It is important for surveyors to understand the limits of the SLAM stack’s ability to successfully mitigate aliasing in order to successfully digitise highly repeatable environments.
4.2 Environmental Adaptation
Developing SLAM systems that are adaptable to various environmental complexities, and integrating additional sensing modalities, can reduce susceptibility to aliasing. On-going improvements are continually made to ensure that fiducials and markers can be successfully used to uniquely identify spaces in order to minimise the impacts of accidental aliasing.
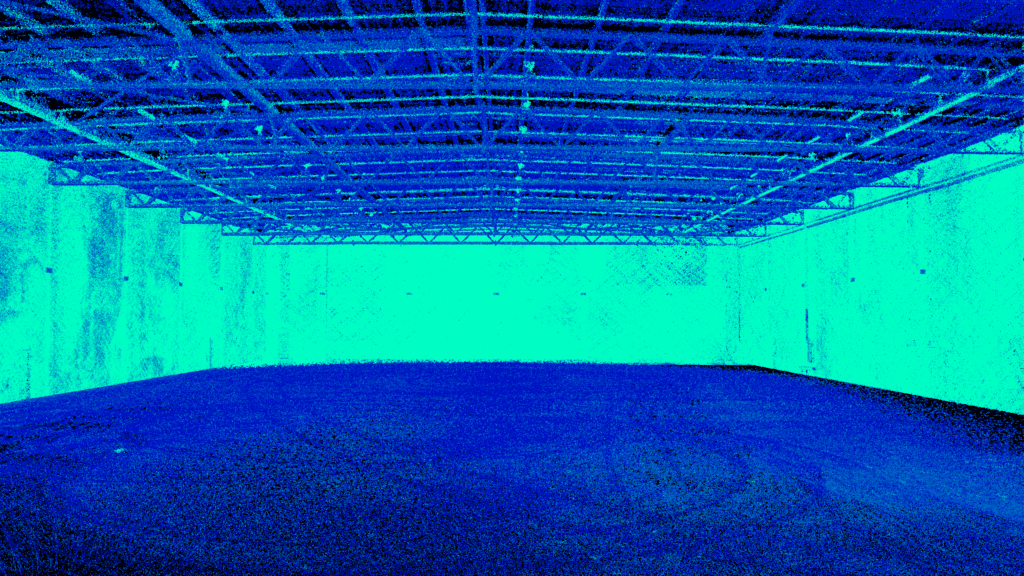

Highly repeatable or spaces with low level of uniqueness
5. Conclusion
Aliasing in SLAM scanners poses a significant challenge to the accuracy and reliability of mapping in survey, reality capture and autonomous navigation systems. This white paper has provided an analysis of aliasing, outlining its origins, impacts and the potential mitigation strategies. Through increased sampling rates, motions smoothing and environmental adaptation it is possible to significantly reduce aliasing leading to more accurate maps and reliable autonomous navigations systems. Addressing aliasing is a critical step towards advancing the field of survey and robotics and ensuring the success of mapping and autonomous systems in diverse and complex environments.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}